Paper Read 1 - Trajectory modification considering dynamic constraints of autonomous robots
Abstract
- “timed elastic band” considers temporal aspects of the motion in terms of dynamic constraints, a trajectory with explicit dependence on time
- formulated in a weighted multi-objective optimization framework
- Most objectives are local, a sparse system matrix
Introduction
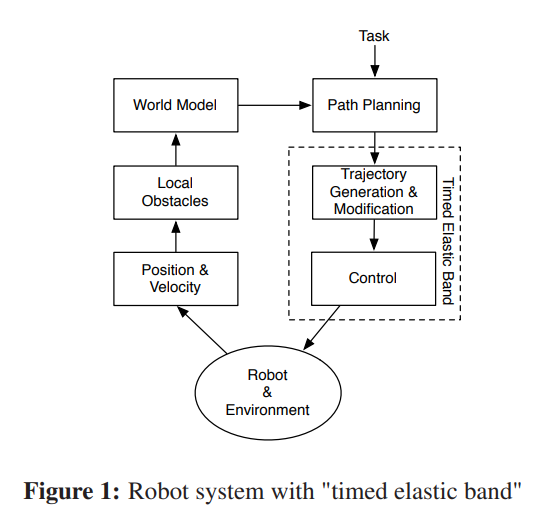
In the context of motion planning this paper focuses on local path modification assuming that an initial path has been generated by a global planner. Our approach, called “timed elastic band” is novel as it explicitly augments “elastic band” with temporal information, thus allowing the consideration of the robot’s dynamic constraints and direct modification of trajectories rather than paths.
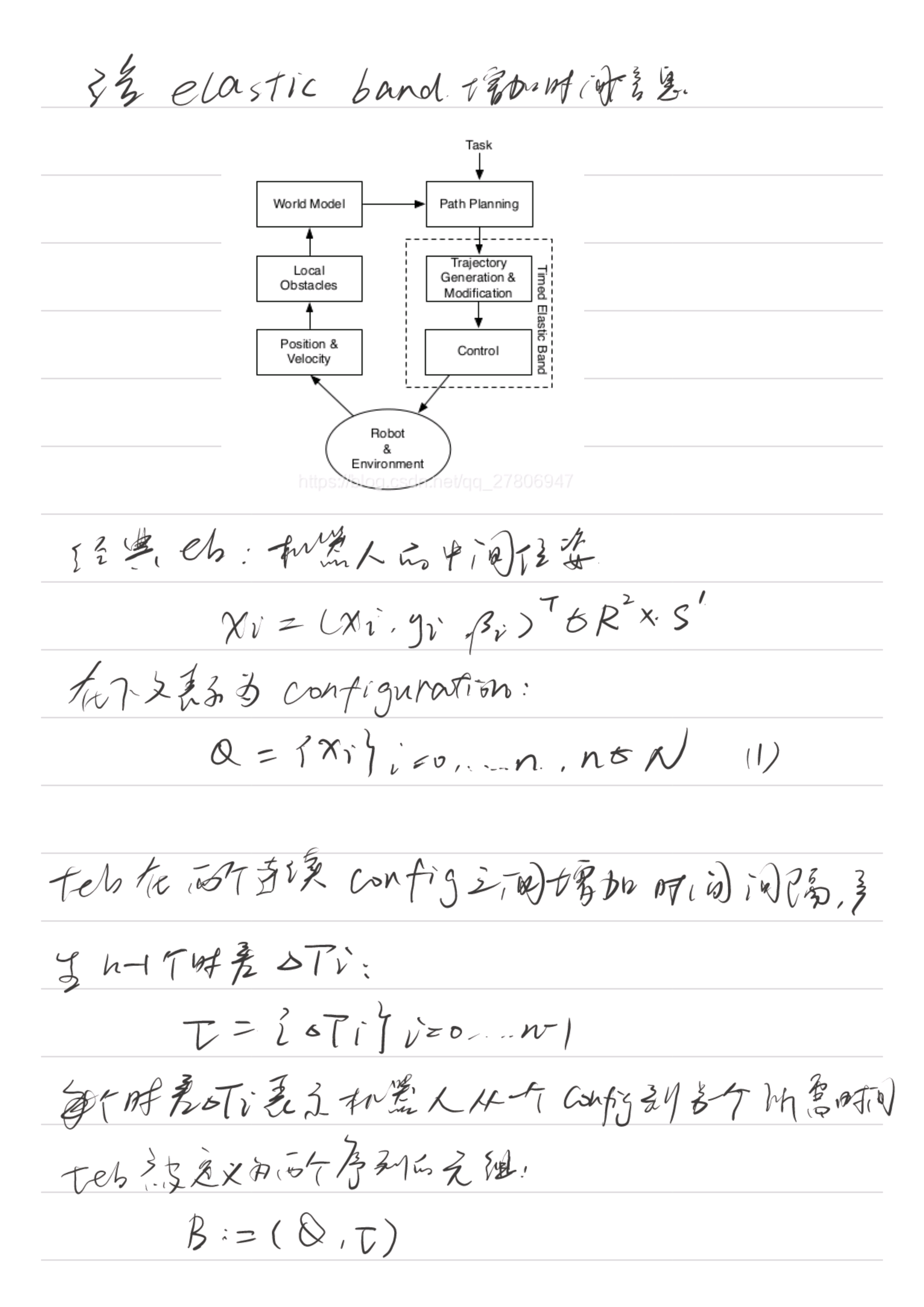
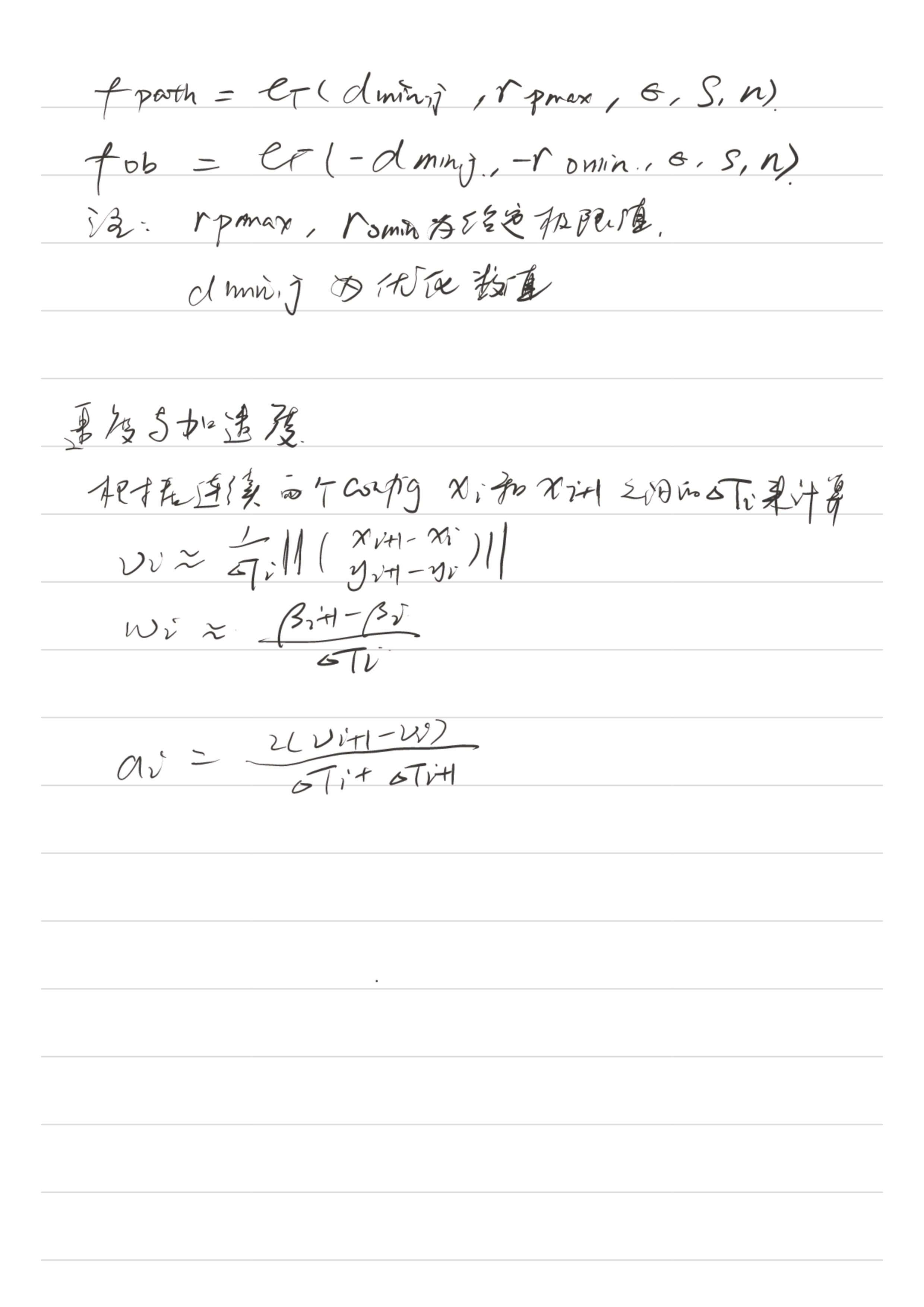
The objective of a fastest path is easily achieved by minimizing the square of the sum of all time differences. This objective leads to a fastest path in which the intermediate configurations are uniformly separated in time rather than space.
\[f_k=\left(\sum_{i=1}^n \Delta T_i\right)^2\]Control flow of the implemented TEB:
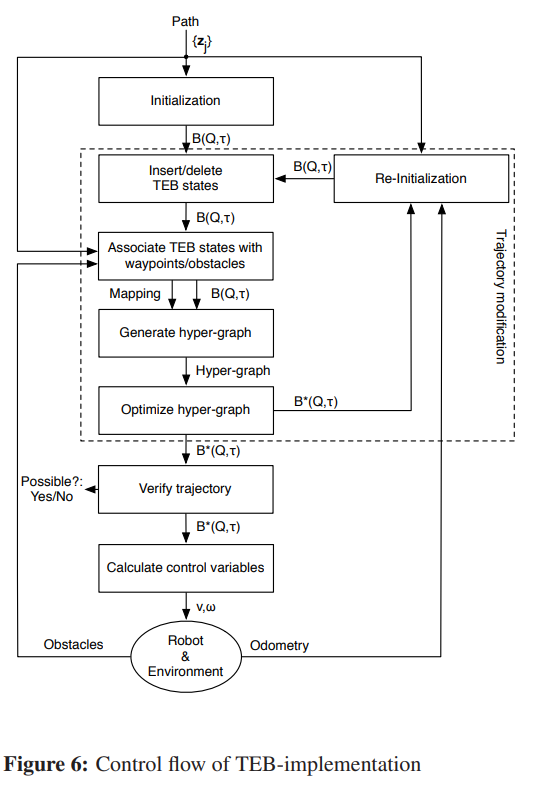
STEP1: an initial path is enhanced to an initial trajectory by adding default timing information respecting the dynamic and kinematic constraints
STEP2: dynamically adds new configurations or deletes previous ones in order to adjust the spatial and temporal resolution to the remaining trajectory length or planning horizon
STEP3: The optimization problem is transformed into a hyper-graph that has configurations and time differences as nodes. They are connected with edges representing given objective functions or constraint functions
STEP4: solved with large scale optimization algorithms for sparse systems which are contained in the “g2o-framework”
STEP5: Before every new iteration, the re-initialization phase checks new and changing way-points which can be useful if way-points are received after analyzing shortrange camera or laser-scan data